【书香滴人】学数学,我们是认真的!
搜索
首页
七年级上册
七年级下册
八年级上册
八年级下册
九年级上册
九年级下册
初中总复习
5.手拉手模型
5.手拉手模型
例题解析
2023-11-16 10:25:44
527
0
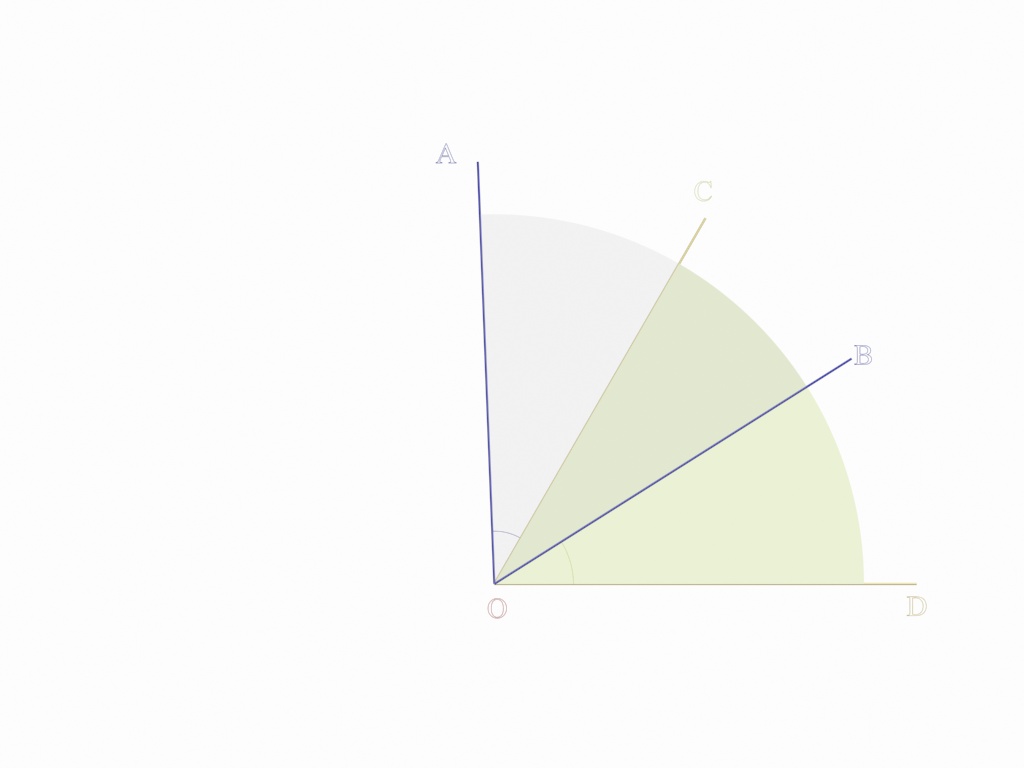
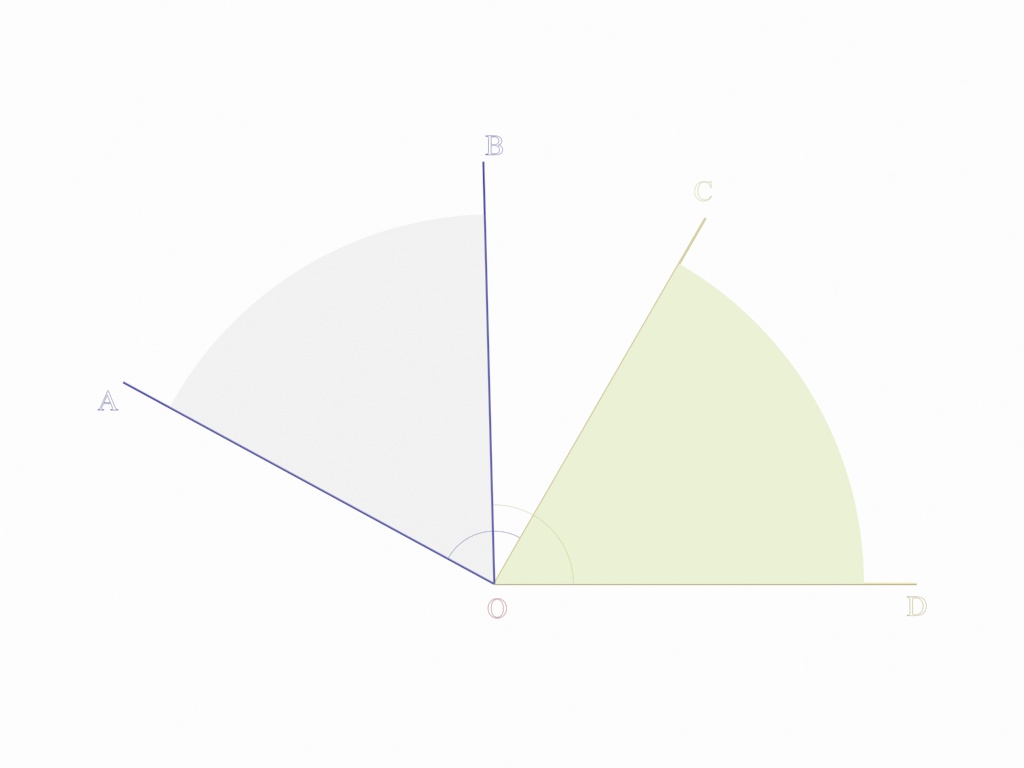
手拉手模型
5.手拉手模型
知识点学习和分析
2023-11-16 10:19:02
368
0
5.手拉手模型 知识点学习和分析
查看更多